近年、小型人工衛星の打ち上げ需要が急激に増加しています。しかし、人工衛星の打ち上げ希望数に対して、人工衛星を宇宙空間まで運ぶロケットの打ち上げの機会が大幅に不足しており、小型衛星を打ち上げるためには、大型の主衛星の打ち上げの際の余剰打ち上げ能力を活用する、いわゆる相乗りをすることが主流となっています。この相乗りには、単独でロケットを打ち上げるのに比べて遥かに少ない費用で人工衛星を宇宙空間に輸送できるという大きなメリットがある一方、打ち上げ時期や投入軌道を自由に選ぶことができないというデメリットが存在します。そこで当研究室は、小型衛星の軌道変換用スラスターにハイブリッドロケットを用いた。“ハイブリッドキックモータ”の研究・開発を進めています。


相乗りに適したハイブリッドキックモーター
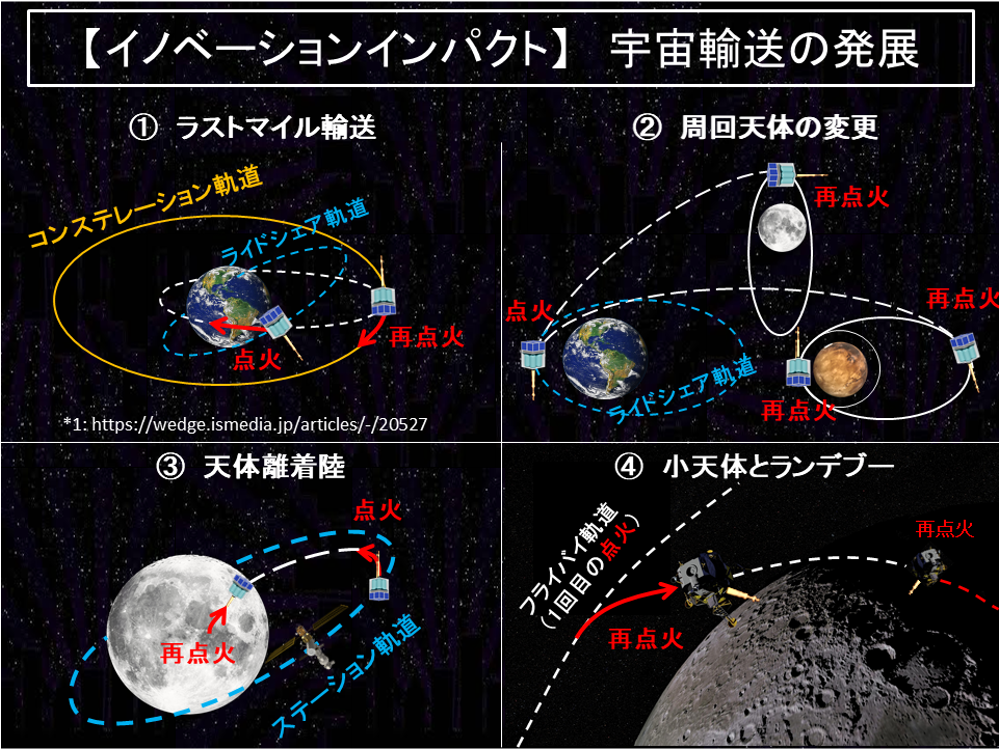
ハイブリッドロケットはその安全性・低コスト性の観点から相乗りに適したキックモータなのです。打ち上げ用ロケットでは、打ち上げ時に一度点火ができれば良く、再点火性は必要がありません。しかし、宇宙空間において、交点を持たない軌道への軌道変換(ホーマン遷移等)、他天体周回軌道への軌道投入、あるいは重力天体への着陸等を目的としたキックモータには、再点火性が不可欠です。今後は、
- 高比推力を維持する固体燃料形状設計の自在性の確立
- ノズルスロート浸食履歴を予測した上での最適ノズル形状設計
- ノズルスロート浸食を抑制するノズル材料と作動条件の確立
- 自己加圧供給型の酸化剤流量系の確立
- 宇宙空間でのキックモータ再点火技術の確立
- 6軸推力計測のデータ取得方法および力学分析
- 姿勢制御用のコールドガススラスターの開発
等の研究に取り組んでいきます。